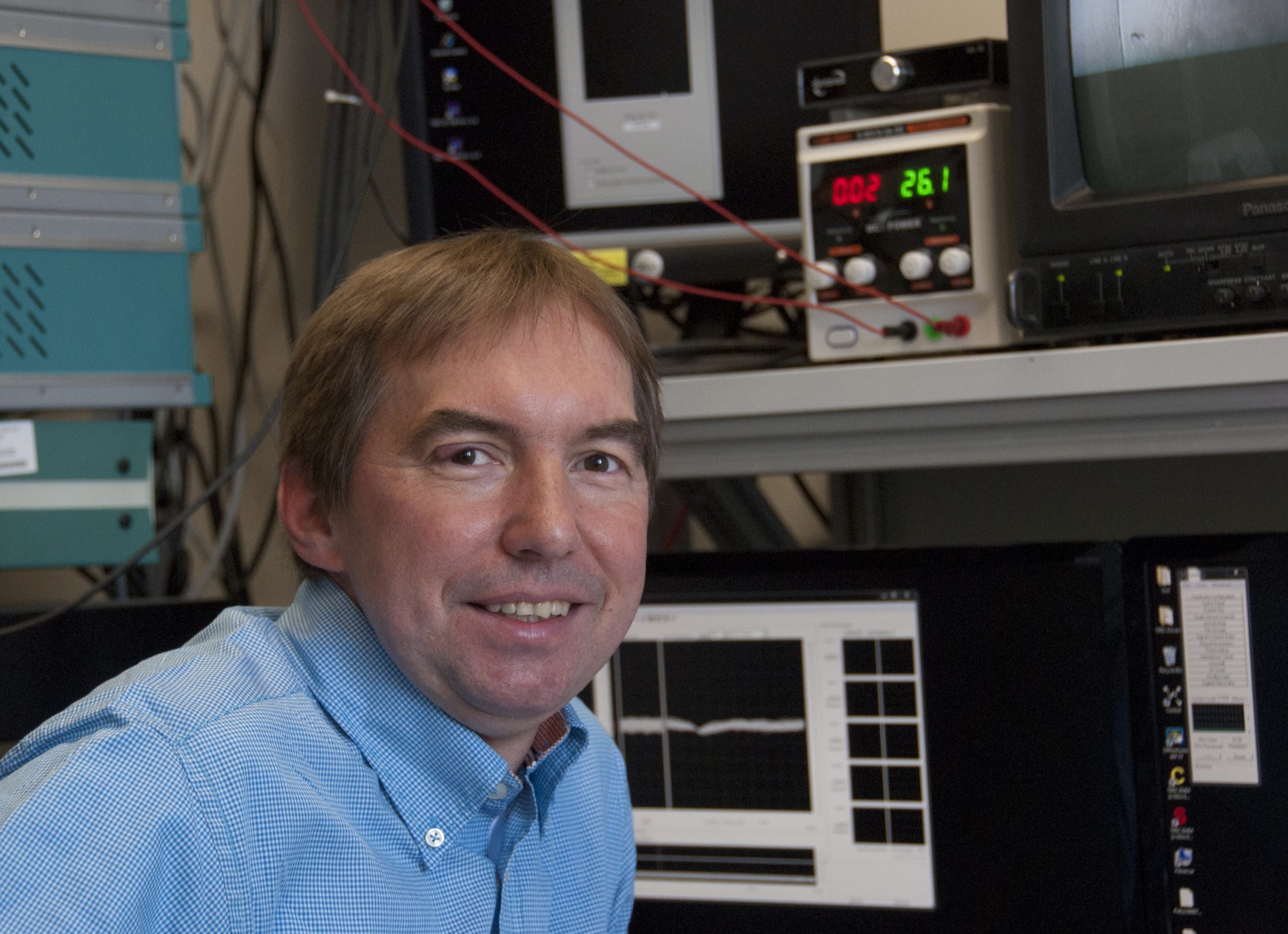
Ein Patient sitzt vor einem Bildschirm und bewegt einen Cursor. Er klickt auf eine Schaltfläche, öffnet ein E-Mail-Fenster und schreibt einen Text. Nichts Besonderes? – Doch! Der Patient, wir nennen ihn MN, tut es, ohne seine Hände zu bewegen, nur mit der Kraft seiner Gedanken. MN ist nämlich seit einer Verletzung am Hals von dort abwärts querschnittsgelähmt. Er sitzt im Rollstuhl, kann Arme und Beine nicht bewegen und wird assistiert beatmet. Seine Bewegungsabsichten detektiert ein Computer mit Hilfe von Elektroden, die ins Gehirn implantiert wurden. Sie leiten die Aktivität einzelner Nervenzellen ab. Ohne diese Elektroden würden seine Bewegungsabsichten nie zur Ausführung kommen. So aber werden die Aktivitätsmuster aus dem Gehirn fortlaufend registriert, interpretiert und als Steuersignale verwendet, um einen Cursor auf einem Bildschirm zu bewegen oder Buchstaben zu schreiben. Die Aufgabe gelingt nur mit Mühe, aber immerhin so leicht, dass MN nebenher mit dem Experimentator sprechen kann. Die Sprache und die Neuroprothese sind für ihn die einzig verbliebenen Möglichkeiten der Kommunikation.
Patienten wie MN sind leider keineswegs selten. Verletzungen der Wirbelsäule und des Rückenmarkes mit nachfolgender Querschnittslähmung treten immer wieder auf, auch bei jüngeren Leuten, nach Unfällen zu Hause, im Verkehr oder bei der Arbeit. Weiterhin gibt es schwerwiegende degenerierende Erkrankungen, bei denen ebenfalls Teile des motorischen Nervensystems zugrunde gehen (z.B. bei Patienten mit Multipler Sklerose oder mit ALS), und eine große Gruppe von Schlaganfall-Patienten, bei denen einzelne Hirnareale oder aus dem Gehirn absteigende, motorische Nervenbahnen geschädigt sind. Hieraus resultieren sehr häufig Lähmungen einer Körperhälfte oder der Sprache. Schließlich gibt es die Gruppe der Patienten mit Gliedmaßenamputationen, welche insbesondere nach Zeiten kriegerischer Auseinandersetzungen immer wieder ins öffentliche Bewusstsein tritt. Patienten mit fehlenden Gliedmaßen können mit Prothesen versorgt werden, die eine gewisse kosmetische und funktionelle Versorgung bieten. Einen adäquaten Funktionsersatz, etwa einer fehlenden Hand, gibt es jedoch nicht. Dies liegt nicht an fehlenden technischen Möglichkeiten, Prothesen mit entsprechender Beweglichkeit und Motorik zu bauen, sondern an dem Problem, sie für den Patienten steuerbar zu machen. Genau hier setzt die Neuroprothetik an. Die Hoffnung ist, nicht nur Patienten mit Amputationen, sondern auch anderen Patienten mit schweren Lähmungen oder sonstigen Bewegungseinschränkungen helfen zu können.

Der Patient MN hat ein intaktes Gehirn. Er kann die Umwelt mit seinen Sinnen wahrnehmen und verarbeiten, jedoch mit ihr nicht mehr oder nur sehr eingeschränkt interagieren. Dabei kann MN sehr wohl Wünsche und Bewegungsabsichten in seinem Gehirn entwickeln und formulieren, die resultierenden Steuersignale werden jedoch durch die verletzungsbedingte Unterbrechung im Rückenmark nicht mehr zu den ausführenden Muskeln weitergeleitet. Neuroprothesen versuchen, diese Unterbrechung zu umgehen oder zu überbrücken. Mit anderen Worten, Neuroprothesen versuchen motorische Signale direkt aus dem Gehirn auszulesen, um damit externe Geräte wie eine Roboterhand oder einen Computerbildschirm zu steuern.
Während die Robotik in der Lage ist, menschenähnliche Roboterhände zu bauen und zu bewegen, liegt das Hauptproblem der Neuroprothetik wie zu erwarten darin, adäquate Steuersignale aus dem Gehirn auszulesen und zu interpretieren. Die Experimente mit Patient MN, wie auch mit anderen, haben gezeigt, dass dies möglich ist. Doch wie ist es möglich?
Technisch gesehen sind Neuroprothesen eine Schnittstelle für den Informationsaustausch zwischen dem Nervensystem und einem Computer oder technischem Gerät. Synonym spricht man deshalb auch von einer Gehirn-Computer-Schnittstelle, Gehirn-Maschine-Schnittstelle oder einem neuronalen Interface. Allen Neuroprothesen ist gemein, dass sie Signale des Nervensystems detektieren und in Echtzeit analysieren, um daraus die intendierte Bewegung vorherzusagen. Um dies zu erreichen, sollten die neuronalen Signale in zweierlei Hinsicht gut ausgewählt werden. Einerseits müssen die registrierten Signale die Bewegungsabsicht, die sie auslesen sollen, tatsächlich enthalten; denn es ist nicht hilfreich, ein Signal zu verwenden, das die gesuchte Information nicht enthält oder von dem wir die Informationskodierung nicht kennen. Andererseits sollten die neuronalen Signale möglichst gut zugänglich sein. Dies lässt externe Ableittechniken gegenüber invasiven Methoden vorteilhafter erscheinen, bei denen die Signale mittels implantierter Sonden (Elektroden) aufgezeichnet werden.
Nichtinvasive Neuroprothesen basieren meist auf den Signalen des Elektroenzephalogramms (EEG). Diese auch Hirnstromkurven genannten Signale werden mit Elektroden aufgezeichnet, die auf die Kopfhaut aufgeklebt sind. Sie messen das elektrische Feld des Gehirns, wie es außerhalb des Schädels auf der Kopfhaut registriert werden kann. Das EEG hat zeitlich eine sehr gute, räumlich aber eine sehr schlechte Auflösung und ist funktionell eine Mittelung der Aktivität eines mehrere Quadratzentimeter großen Gehirnareals. Aus diesem Grund zeigt das EEG keine einzelne, individuelle Bewegungsabsicht, sondern ein Summationssignal, das eine große Anzahl gleichzeitig vorhandener neuronaler Aktivitäten mittelt, welche in der räumlichen Distanz zum Entstehungsort und durch den knöchernen Schädel hindurch nicht mehr separierbar sind. Dennoch gelingt es vielen Versuchspersonen mit entsprechendem Training, bestimmte Komponenten des EEG willkürlich zu beeinflussen. Solche Signalkomponenten können zur Steuerung einer nicht-invasiven Neuroprothese genutzt werden, etwa zum Selektieren von Buchstaben oder für das zielgerichtete Bewegen eines Computercursors.
Leider gibt es eine Reihe von Nachteilen, welche die Verwendbarkeit solcher EEG-basierter Neuroprothesen für Patienten stark einschränken. Zum einen ist der Informationsfluss sehr limitiert. Dies erschwert die Steuerung komplexer Aktionen wie das individuelle Bewegen mehrerer Finger beim Greifen. Des Weiteren sind nichtinvasive Neuroprothesen auf äußere Störungen sehr anfällig, wie etwa auf Änderungen der Lichtverhältnisse oder das Auftreten von akustischen Reizen (Geräusche, Sprache). Dies schränkt ihre Leistungsfähigkeit stark ein. Schließlich scheint das Erlernen dieser Methode nur einem Teil der Versuchspersonen möglich zu sein. Aus diesen Gründen sind Neuroprothesen mit implantierbaren Elektroden für viele Patienten eine interessante Alternative.
Bei Neuroprothesen mit implantierten Elektroden befinden sich die Sensoren (Elektroden) entweder direkt im Gehirn oder sie liegen dem Gehirn unmittelbar auf. Dies bietet die Möglichkeit, aus einem eng umschriebenen Hirnareal gleichzeitig viele verschiedene Signale in hoher Auflösung aufzuzeichnen. Auch ist es damit möglich, neuronale Aktivität von einzelnen Nervenzellen, oder relativ kleinen Zellverbänden, direkt zu registrieren. Mit anderen Worten, die lokale Aktivität eines bestimmten Hirnareals kann selektiv abgehört werden. So können beispielsweise aus einem kortikalen Areal, das für die Planung und Ausführung von Greifbewegungen spezialisiert ist, Hand- und Fingerbewegungen mit implantierten Elektroden um Größenordnungen präziser, detaillierter und robuster vorhergesagt werden, als dies mit nichtinvasiven Techniken möglich ist. Des Weiteren sind Signale von implantierten Elektroden wesentlich weniger von externen Störungen betroffen, wie etwa ablenkenden Sinneseindrücken oder dem gleichzeitigen Planen und Ausführen anderer Handlungen, da die abgeleiteten Signale nur die lokale Hirnaktivität repräsentieren und keine Mittelungen über größere Hirnbereiche darstellen. Diese enorme Signalspezifität bis hin zur isolierten Darstellung der Aktivität einzelner Nervenzellen, den sogenannten Aktionspotenzialen, ermöglicht die Entwicklung von Neuroprothesen mit hoher Präzision und Robustheit und einem Informationstransfer, der erheblich über dem von nichtinvasiven Methoden liegt.
Um den Wirkungsgrad von Neuroprothesen zu verbessern kann außerdem die Plastizität des Gehirns in natürlicher Weise ausgenutzt werden. Das Gehirn passt sich ständig an veränderte Eingangs- und Ausgangssignale an. Dies gilt nicht nur für den eigenen Muskel- und Bewegungsapparat, sondern auch für Neuroprothesen. Dabei passt sich das Gehirn an die Kodierungsregeln der Neuroprothese an, um damit die Vorhersagegenauigkeit zu verbessern. Dies ist immer dann möglich, wenn das Gehirn eine Rückmeldung über die bei der Dekodierung aufgetretenen Fehler, etwa über das Sehsystem, erhält. Im Extremfall kann sich das Gehirn sogar innerhalb weniger Tage und Wochen an einen völlig unkalibrierten Dekodierungsalgorithmus anpassen, wenn in diesem Zeitraum die Signale stabil genug bleiben, damit das Gehirn genügend Zeit hat, sich an die fehlerhafte Dekodierung der abgeleiteten Signale anzupassen.
Ein großes, noch ungelöstes Problem von invasiven Neuroprothesen besteht jedoch darin, dass sich der Körper im Allgemeinen gegen eingebrachte Fremdkörper wehrt und versucht, diese einzukapseln. Diese Fremdreaktion ist für viele Implantate funktionell meist ohne Bedeutung, wie etwa für Brustimplantate oder Herzschrittmacher. Für Ableitelektroden im Gehirn hat eine solche Fremdkörperreaktion jedoch zur Folge, dass die Nervenzellen in unmittelbarer Nähe der Elektrode abgedrängt werden und die abgeleiteten Signale abgeschwächt werden, bis sie schließlich im allgemeinen Rauschen untergehen und keine Kommunikation mehr möglich ist. Neuroprothesen können auch mit Signalen des peripheren Nervensystems (PNS) betrieben werden. Hierbei werden Bewegungsabsichten entweder aus einem peripheren Nerv oder von einem hiervon innervierten Muskel abgeleitet. Periphere Neuroprothesen benötigen intakte Leitungsbahnen aus dem Gehirn und vom Rückenmark, weshalb das Verfahren derzeit vorwiegend bei Patienten mit Amputationsverletzungen getestet wird. Bei solchen Patienten stehen periphere Signale am Rumpf oder am Gliedmaßenstumpf zur Verfügung, welche mit invasiven oder nichtinvasiven Elektroden registriert werden können. Periphere Neuroprothesen übertragen somit Steuersignale von einem peripheren Nerv oder einem Muskel auf einen künstlichen Effektor (z.B. Computercursor, Roboterhand). Eine solche neuro- oder myographische Übertragung ist zwar robust, aber nicht unbedingt differenziert. Einfache Signale können damit sehr gut übertragen werden. Komplexe und koordinierte Steuerungen, wie sie für Hand- und Fingerbewegungen erforderlich sind, sind damit jedoch schwer zu realisieren. Aus diesen Gründen wurden periphere Neuroprothesen bisher hauptsächlich zur Steuerung von einfachen Prothesen eingesetzt. Auch in der Peripherie sind implantierbare Systeme von großem Interesse, da sie, einmal implantiert, über längere Zeit autonom arbeiten können und nicht täglich neu angebracht werden müssen. Für die praktische Anwendbarkeit ist dies von großer Bedeutung, insbesondere für Patienten, die beim Anlegen des Systems auf fremde Hilfe angewiesen sind (Hatsopoulos and Donoghue, 2009).
Das Gebiet der Neuroprothesen hat in den letzten 10 bis 15 Jahren große Fortschritte gemacht. Diese sind unmittelbar verknüpft mit unserem Wissen über die Funktionsweise des Gehirns und unserer Fähigkeit, neuronale Signale aus dem Gehirn auszulesen. Hierzu waren grundlegende Erkenntnisse in mindestens drei verschiedenen Wissensbereichen von zentraler Bedeutung: der systemischen Neurophysiologie, der biokompatiblen Materialforschung und der Informationsverarbeitung und Mikroelektronik. Diese Bereiche, und in zunehmendem Maße auch die Medizin, haben in den vergangenen Jahren sehr erfolgreich interdisziplinär zusammengearbeitet und dabei die Neuroprothetik wesentlich weiterentwickelt.
Für die Entwicklung von Neuroprothesen hat das seit über 100 Jahren erworbene Grundwissen über die Funktionsweise des Nervensystems eine entscheidende Rolle gespielt. Ausgehend von der Entdeckung der spezifischen elektrischen Erregbarkeit des Gehirns, der Bedeutung von Nervenzellen für die Hirnanatomie (Cajal, Nobelpreis für Medizin 1906) und Hirnphysiologie (Sherrington und Adrian, Nobelpreis für Medizin 1932) sowie der anatomischen Kartierung der Hirnareale wurden grundlegende Funktionsprinzipien des Gehirns aufgedeckt und einzelnen Funktionsbereichen, zumindest grob, zugeordnet. Diese grundlegenden Erkenntnisse bewirkten ungeheure Innovationen in der Medizin, insbesondere in der Neurologie und Neurochirurgie.
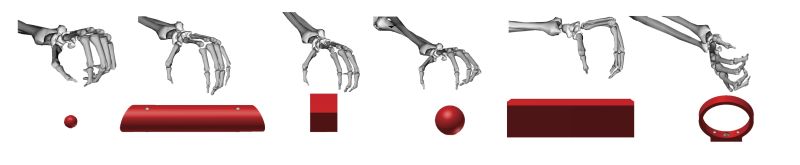
Für die Neuroprothetik war es wesentlich, ein Verständnis zu gewinnen, wie neuronale Areale sensorische, motorische und interne (z.B. kognitive) Signale verarbeiten. So sind einzelne Nervenzellen im motorischen und prämotorischen Kortex etwa dadurch gekennzeichnet, dass sie für eine bestimmte Greifbewegung (z.B. Kraftgriff, wie beim Greifen eines Astes) besonders aktiv und bei einem anderen Griff dagegen inaktiv sind (z.B. Präzisionsgriff, wie beim Greifen einer Beere). Diese bevorzugten Grifftypen einzelner Neurone sind individuell verschieden, sodass sich die Aktivitätsmuster in der neuronalen Population für beliebige Greifbewegungen stets unterscheiden (Vargas-Irwin et al., 2010; Townsend et al., 2011). Hat man nun die Bewegungskodierung einer gegebenen neuronalen Population verstanden, kann man aus einem gegebenen Populationsmuster eine Vorhersage (oder Dekodierung) der beabsichtigten Bewegung gewinnen. Wichtig ist dabei zu berücksichtigen, dass verschiedene Signale nicht strikt voneinander getrennt vorliegen, sondern miteinander interagieren. So werden etwa motorische Neurone auch durch sensorische und kognitive Signale, wie etwa Aufmerksamkeit, Erwartung, oder Belohnung, moduliert. Dies macht präzise Bewegungsvorhersagen schwierig, jedoch können die verschiedenen Informationen aus der neuronalen Population, anders als beim EEG, gut separiert werden. Beim Affen konnte damit eine dreidimensionale Steuerung eines Roboterarmes mit Greifer gebaut werden, mit dem die Tiere allein durch Gedanken Futter greifen und zum Mund führen konnten.
Klassischerweise werden für Ableitexperimente in der Systemphysiologie glas- oder lackisolierte Metallelektroden verwendet, um Aktionspotenziale einzelner Nervenzellen zu detektieren. Für Neuroprothesen müssen jedoch Signale von sehr vielen Neuronen gleichzeitig erfasst werden. Dies wurde möglich durch die Entwicklung von Elektrodenmatrizen, bei denen viele Einzelelektroden blockweise verbunden sind (z.B. in Reihen und Spalten). Solche Elektrodenbündel können dann in ein Zielgebiet, etwa ein kortikales Areal, permanent implantiert werden. Dabei sind die einzelnen Elektroden mittels Kabel mit einem nach außen führenden Stecker verbunden, wo die elektrischen Signale dann verstärkt und aufgezeichnet werden können. Die Kabelverbindung hat den Vorteil, dass die implantierten Elektroden ohne Zug- und Scherkräfte dem sich in der Schädelhöhle bewegenden Gehirn folgen können. Neben Elektroden aus Metall gibt es zunehmend auch solche aus Silikon oder Kunststoff, zu deren Entwicklung Methoden der Mikrosystemtechnik Verwendung finden, also der gleichen Technologie wie zur Herstellung von elektronischen Mikrochips.
Ein wichtiger Punkt bei der Entwicklung der Elektroden ist auch die Biokompatibilität. Für Neuroprothesen ist dies von großer Bedeutung, da implantierte Elektroden derzeit keine unbeschränkte Lebensdauer haben, sondern wie alle Fremdkörper langsam vom Körper eingekapselt werden. Dabei bildet sich eine bindegewebige Barriere zwischen Elektrode und Nervengewebe, welche die Funktion der Elektrode stark einschränken oder ganz zum Erliegen bringen kann. Dies geschieht typischerweise nicht sofort, sondern in einem Zeitraum von Monaten bis Jahren nach der Implantation. Die Entwicklung von Materialien, die möglichst nur eine minimale Abwehrreaktion auslösen, ist daher für die breite klinische Nutzung von implantierten Neuroprothesen sehr wichtig. Patienten müssten sonst unverhältnismäßig oft operiert werden, was mit einer erhöhten Komplikationsrate verbunden wäre (z.B.: Infektionen, Gewebetraumen).
Des Weiteren wird zur Reduktion der körpereigenen Abstoßungsreaktion die Anwendung von entzündungshemmenden Substanzen getestet, wie die kontinuierliche Freisetzung von Wirkstoffen aus dem Implantat. Außerdem werden für die Neuroprothetik auch alternative Signale in Betracht gezogen, die möglicherweise auch mit einer abgekapselten Elektrode registriert werden können. Hierbei handelt es sich namentlich um Multi-Unit-Aktivität, ein Kombinationssignal von vielen Einzelneuronen, das lokale Feldpotenzial, ein Summationssignal von dendritischer Aktivität und das Elektrocortikogramm (ECoG), ein auf der Hirnoberfläche aufgenommenes EEG (Abb. 4). Diese Signale werden aktuell in verschiedenen Hirnarealen getestet, um zu prüfen, ob sie zum Dekodieren geeignet sind, und falls ja, wie robust und langlebig sie sind.
An der erfolgreichen Entwicklung von Neuroprothesen hat auch die Informationstechnologie einen wesentlichen Anteil. Diese war in den letzten Jahren und Jahrzehnten durch eine exponentielle Zunahme der verfügbaren Rechenleistung gekennzeichnet. Hiermit wurde es möglich, die Signalverarbeitung und Datenextraktion mit aufwendigen Algorithmen und in vielen Kanälen gleichzeitig durchzuführen, was früher nicht praktikabel war. Außerdem existieren heute mächtige Softwarepakete zur Datenanalyse (z.B. Matlab, Phyton, Mathematica), was die Entwicklung und Testung neuer Algorithmen sehr beschleunigt. Schließlich erlaubt die zunehmende Miniaturisierung der Elektronik die Entwicklung von implantierbaren Mikrosystemen. Hiermit wird es möglich, nicht nur die Aufnahme und Extraktion der Daten autonom zu bewerkstelligen, sondern auch die ausgelesenen Signale mittels Telemetrie kabellos nach außen zu senden. Mikrosysteme benötigen trotz hohen Informationsdurchsatzes nur wenig Energie, was auch eine kabellose (z.B. induktive) Energieversorgung erlaubt. Damit wird die Realisierung von komplett implantierbaren Systemen möglich, was eine wichtige Voraussetzung für die dauerhafte Nutzung bei Patienten darstellt.
Wie in den vorangegangenen Abschnitten ausgeführt, hat Forschung mit Labortieren für die Entwicklung von Neuroprothesen eine zentrale Bedeutung. Ohne Erkenntnisse aus Tierexperimenten, und insbesondere von solchen mit Primaten, wüssten wir heute nur sehr wenig über die Mechanismen der Bewegungsplanung im Gehirn, und wir wären kaum in der Lage, klinisch verwertbare Neuroprothesen zu entwickeln. Bei den vielen noch offenen Fragen ist auch evident, dass Forschung mit Tieren in absehbarer Zukunft weiterhin notwendig sein wird, um unser Wissen zu erweitern und wichtige Entwicklungen voranzutreiben.
Tierforschung mit Primaten ist nicht nur für die Entwicklung von Neuroprothesen von zentraler Bedeutung. Auch in vielen anderen Forschungsgebieten ist sie unabdingbar, etwa in der Infektionsforschung, bei degenerativen Hirnerkrankungen oder in der organismischen Primatenforschung. Die Notwendigkeit solcher Tierforschung wurde wissenschaftlich vielfach belegt. Dennoch wird von ideologischer Seite immer wieder die These aufgestellt, Tierversuche seien generell überflüssig und sinnlos, da die gewonnenen Erkenntnisse nicht auf den Menschen übertragbar seien. Dies ist jedoch unzutreffend, wie schon das Beispiel Neuroprothetik zeigt. Andere Forschungsgebiete, wie die Entwicklung der tiefen Hirnstimulation, das Verstehen von schweren Infektionskrankheiten (z.B. HIV/SIV, Hepatitis) oder die Genetik und Reproduktionsmedizin, sind ebenso auf Tierforschung mit Primaten angewiesen. Das Unterlassen oder ein Verbot von Tierforschung mit Primaten hätte daher sehr negative Konsequenzen auf vielen Gebieten der Wissenschaft, insbesondere der Forschungsentwicklung der betroffenen Staaten.
Die Genehmigung und Durchführung von Tierexperimenten ist in einigen europäischen Ländern seit Längerem sehr stringent reglementiert (u.a. Schweiz, Deutschland, UK und Holland). Diese Regelungen ermöglichen notwendige Experimente mit Tieren, räumen aber dem Tierschutz einen hohen Stellenwert ein. Das administrative Verfahren zur Genehmigung und Überwachung ist komplex und verlangt neben der detaillierten Darstellung des Forschungsprojektes auch dessen explizite Rechtfertigung. Hiermit werden methodologisch als auch ethisch hohe Hürden gesetzt, welche mit der neuen EU-Richtlinie (2010/63/EU) nun auch auf ganz Europa ausgeweitet wurden.
Des Weiteren haben Wissenschaftler ein inhärentes Interesse daran, die Aussagekraft ihrer Experimente zu optimieren. In der systemischen Neurophysiologie ist dies beispielsweise nur möglich, wenn die Tiere das Experiment stressfrei erleben. Dies ist durch eine umsichtige und langsame Gewöhnung an die Versuchsaufgabe zu erreichen. Solche Überlegungen führten schon seit Langem zu einer kontinuierlichen Verbesserung der experimentellen Methoden (Refine!), zu einer Reduktion der für ein Experiment benötigten Anzahl an Tieren (Reduce!) und wenn immer möglich zum Ersatz von Tierexperimenten durch alternative Verfahren (Replace!).
Das Prinzip der drei «R» (3R: Refine, Reduce, Replace), wurde erstmals 1959 von Russel und Burch vorgestellt. Es gilt heute als die wohl effektivste und pragmatischste Methode, um Belastungen von Versuchstieren zu minimieren. Die Methode wird von vielen Wissenschaftlern seit Langem praktiziert, in jüngster Zeit jedoch auch vermehrt öffentlich diskutiert (Basler Deklaration, 2010; Autor ist Mitunterzeichner). Solche Diskussionen sind wichtig, um den Sinn und Zweck von Tierexperimenten in der Öffentlichkeit zu verdeutlichen. Dabei wäre es sinnvoll, vorhandene Belastungen von Versuchstieren ideologiefrei und nach objektiven Kriterien zu beurteilen und sie auch im Vergleich zu anderen Formen der Tiernutzung in unserer Gesellschaft zu betrachten (z.B. Agrar-, Haus- und Zootiere). Dies wäre dem Tierschutz insgesamt sehr förderlich.

Ein Großteil der Forschungsarbeiten mit Tieren, die jetzt für die Entwicklung von Neuroprothesen genutzt werden, wurde nicht speziell für die Neuroprothetik getätigt, sondern unternommen, um grundlegende neurowissenschaftliche Fragen zu beantworten. Dies gilt insbesondere für die frühen Arbeiten. So war etwa die Frage nach der Funktion einzelner Nervenzellen bei der Planung von Bewegungen von grundlegendem Interesse und wurde nicht für eine konkrete Anwendung gestellt. Dass hieraus dennoch wichtige Impulse für praktische Anwendungen ausgingen, war somit eine Folge der grundlegenden Erkenntnis, aber nicht das Resultat eines zielgerichteten Vorgehens.
Dies ist eine allgemeine Eigenschaft der wissenschaftlichen Methode. Es ist nämlich unmöglich, zukünftige wissenschaftliche Erkenntnisse präzise vorherzusehen und sie zielgerichtet zu verfolgen. Grundlagenforschung ist daher potenziell immer anwendungsrelevant. Umgekehrt kann jede zielgerichtete (angewandte) Forschung auch grundlegende Erkenntnisse zutage fördern. Eine Einteilung von Experimenten in grundlagenorientierte oder angewandte Forschung ist daher weder möglich noch sinnvoll.
Für die Beurteilung von Tierexperimenten kann auch das unmittelbare Ergebnis nicht maßgebend sein. Denn zum einen kann es lange dauern, bis der Wert eines Versuchsergebnisses klar erkennbar wird, und zum anderen ist auch ein negatives Ergebnis ein Erkenntnisgewinn. Versuchsresultate fügen sich – wie Steine eines Mosaiks – zu einem Gesamtbild zusammen; die Bedeutung eines Resultats wird daher oftmals erst im Gesamtbild und in der Zusammenschau mit anderen Ergebnissen ersichtlich. Zur Beurteilung eines wissenschaftlichen Versuches ist daher nicht das unmittelbar erzielte Ergebnis entscheidend, sondern die Originalität der Fragestellung, die Qualität der Versuchsdurchführung und der mögliche (nicht erzielte) Erkenntnisgewinn.
Neuroprothesen haben in den vergangenen Jahren sowohl mit nichtinvasiven als auch mit implantierten Verfahren bedeutende Fortschritte erzielt. Diese Fortschritte beruhen maßgebend auf wichtigen Erkenntnissen und Entwicklungen der Neurophysiologie, der Elektrodentechnologie und der Informationsverarbeitung. Sie lassen die Idee von praktikablen und effizienten Gehirn-Maschine-Schnittstellen für gelähmte Patienten zunehmend realistisch erscheinen. Tierexperimente, auch mit Primaten, haben zu diesem Fortschritt entscheidend beigetragen. Dank dieser fortlaufenden Entwicklungen ist mit einiger Berechtigung zu erwarten, dass in den kommenden Jahren mehr und mehr Patienten von dieser sich rasch entwickelnden Neurotechnologie profitieren werden.
zuerst erschienen auf www.forschung-leben.ch


